Muchas veces resulta molesto tener que abrir muchas cuentas para alojar fotos en una, videos en otras. Es más fácil tener una que cumpla con todas. FaceBook, no cubre todo pero lo hace en gran medida y se puede adaptar para otras. Esta herramienta no permite incrustar videos en otras plataformas pero siempre se le encuentra la vuelta:
Obtener ID
Antes que nada es necesario saber el código de identificación del video:

Incrustar video
Una vez obtenido el número, se reemplaza el número de ID por las XXX a continuación:
<object width="400" height="224" >
<param name="allowfullscreen" value="true" />
<param name="allowscriptaccess" value="always" />
<param name="movie" value="http://www.facebook.com/v/XXX" />
<embed src="http://www.facebook.com/v/XXX" type="application/x-shockwave-flash"
allowscriptaccess="always" allowfullscreen="true" width="400" height="224">
</embed>
</object>

Al momento de comenzar un proyecto nuevo es necesario realizar las configuraciones iniciales para trabajar en el ide. En este caso el LCPXpresso sobre un micro NXP LPC1769.
Workspace
El workspace es el entorno de trabajo. Se refiere simplemente a una carpeta del directorio donde se alojarán todos los archivos de los distintos proyectos que se realizan.
Al iniciar el programa suele preguntar con cuál workspace se quiere trabajar o una vez abierto se puede cambiar o crear uno nuevo.
File>>Switch Workspace y se puede elegir alguno de los que estén creados.
 La batería entrega 11,1v, con la cual se alimentan los motores. Para la electrónica que incorpora el sistema es necesaria una tensión inferior de 3,3V.
La batería entrega 11,1v, con la cual se alimentan los motores. Para la electrónica que incorpora el sistema es necesaria una tensión inferior de 3,3V.
La tensión entre el pin de ajuste y salida es siempre de 1,25V (tensión establecida internamente por el regulador), y en consecuencia la corriente que circula por el resistor R1 es:
I_R1=V/R_1 =1,25V/R_1
Esta misma corriente es la que circula por R2. Entonces la tensión en R2:
〖VR〗_2=〖IR〗_1 xR_2
Si se sustituye IR1 en la última fórmula se obtiene la siguiente ecuación:
〖VR〗_2=1,25Vx R_2/R_1
Como la tensión de salida es:
V_out=〖VR〗_1+〖VR〗_2=1,25V+1,25V R2/R1=1,25V(1+R_2/R_1 )
De esta última fórmula se ve claramente que si se modifica R2 (resistencia variable), se modifica la tensión Vout.
Se ha despreciado la corriente (IADJ) que circula entre el pin de ajuste (ADJ) y la unión de R1 y R2. Esta corriente se puede despreciar, tiene un valor máximo de 100 uA y permanece constante con la variación de la carga y/o de la tensión de entrada.
Con el propósito de optimizar la regulación, el resistor R1 se coloca lo más cercano posible al regulador, mientras que el terminal que se conecta a tierra del resistor R2 se lo conecta lo más cercano posible a la conexión de tierra de la carga
 La batería no es un punto menor a la hora de mencionar la estructura. Es un elemento importante ya que será el encargado de mantener en funcionamiento todo el sistema y a su vez es un elemento significativo en su peso.
La batería no es un punto menor a la hora de mencionar la estructura. Es un elemento importante ya que será el encargado de mantener en funcionamiento todo el sistema y a su vez es un elemento significativo en su peso.
Debido a las ventajas de peso y potencia que se obtiene con baterías LIPO, se utilizará este tipo de tecnología. Las más representativas son:
- Alta densidad de energía, prácticamente duplica a las de NiMh.
- Menor volumen y ofrecen un formato más práctico.
- Alto nivel de descarga
- Alto nivel de voltaje por célula, lo que permite mayores voltajes en menor espacio.
- Resistencia interna pequeña, mejorando el aprovechamiento de la energía disponible.
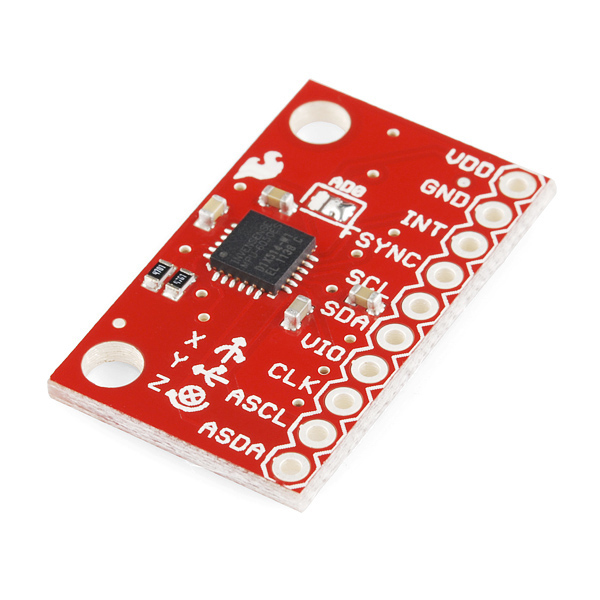
El instrumento encargado de alimentar el control de estabilidad será un circuito integrado llamado MPU6050. Mediante la combinación de un giróscopo de 3 ejes y un acelerómetro de 3 ejes en la misma matriz de silicio, junto a un procesador digital de movimiento (DMP) permite procesar algoritmos complejos eliminando los errores de cruce de ejes.

Las hélices son de variada forma y dimensiones. Características que influyen significativamente en el rendimiento de los motores y el sistema.
Indicación de las hélices:• SF: Slow Fly
• HF: Hyper Drive
• DD: Direct Drive
Otra característica importante a tener en cuenta en las características de las hélices son el paso y el diámetro de las mismas. Un diámetro pequeño proporciona reacciones más rápidas, pero menor empuje. Mientras que un diámetro mayor, caracteriza movimientos más lentos pero con mayor empuje a bajas velocidades. En el caso del paso, es la velocidad de avance.

Dado el consumo de los motores previstos, es necesario colocar un
controlador de velocidad electrónico (ESC) que admita dicha corriente.
Las mismas especificaciones del motor indican un rango de
controladores entre 20 y 30A. Por cuestiones de peso (18grs) y desempeño se opta
por el siguiente
HobbyKing
20A BlueSeries Brushless Speed Controller.
Suscribirse a:
Entradas (Atom)




